هنگامی که مارمولکهای جهنده موسوم به “گکو”(Gecko) با سطوح عمودی مانند تنه درختان برخورد میکنند، میتوانند به جای تکان خوردن و افتادن روی زمین، از آن سطح آویزان شوند. دانشمندان، آنچه را که این توانایی را به گکوها میدهد، کشف کردند و این توانایی را در یک ربات کوچک به کار گرفتند.
این پژوهش به سرپرستی پروفسور “رابرت فول”(Robert Full)، استاد “دانشگاه کالیفرنیا، برکلی”(UC Berkeley)، “اردیان یوسفی”(Ardian Jusufi)، پژوهشگر موسسه “ماکس پلانک”(Max Planck) آلمان، دکتر “رابرت سیدال”(Robert Siddall)، پژوهشگر “دانشگاه ساری”(University of Surrey) انگلستان و دکتر “گرگوری برنز”(Gregory Byrnes)، پژوهشگر “کالج سیینا”(Siena College) در نیویورک انجام شده است.
دانلود و مشاهده عناوین ماهنامه ” اقتصاد دیجیتال” شماره ۱۰، تیر ماه ۱۴۰۰
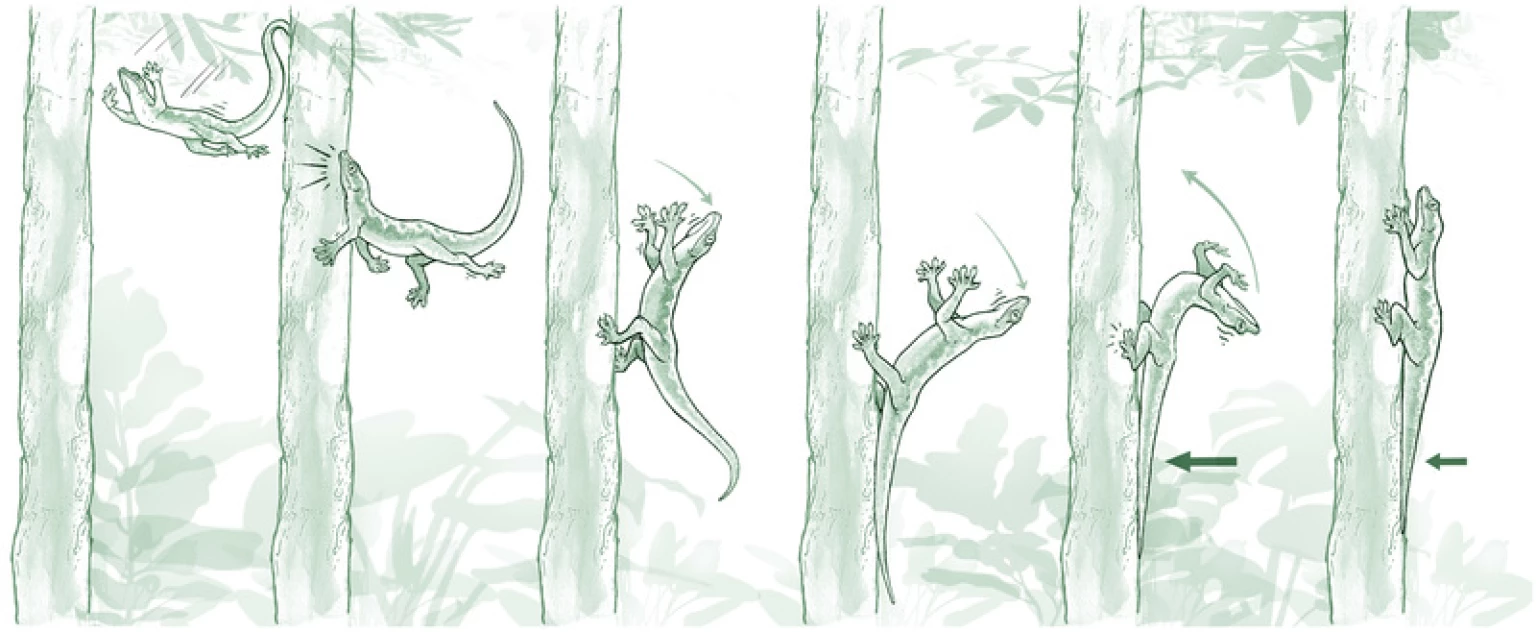
یوسفی طی فصول گوناگون در سنگاپور، چندین فیلم آهسته از نوعی کگوی آسیایی موسوم به “Hemidactylus platyurus” ثبت کرد که از تنه یک درخت به تنه درخت دیگری میپرید. گکوها تلاش میکردند تا از فرود ناخوشایند دوری کنند. آنها هنگام انجام دادن این کار، با سرعتی حدود شش متر در ثانیه حرکت میکردند.
در حالی که سر، شانهها و پاهای جلو از درخت جدا شد، مارمولکها توانستند تنه درخت را با پای عقب خود بگیرند. این کار به آنها امکان داد تا دم بلند خود را روی درخت فشار دهند تا بدین ترتیب عقب رفتن و سقوط آنها روی زمین اتفاق نیفتد.
دانشمندان این مکانیسم مهار را در یک ربات نرم چاپ سهبعدی بازسازی کردند. این ربات به چهار پا، یک دم و یک تاندون داخلی مجهز است که به صورت خودکار راهاندازی میشود تا هرگاه که پاهای جلو، تماس شدیدی با یک سطح داشتند، دم را به سمت پایین فشار دهد.
جهت دانلود و مشاهده عناوین ماهنامه ” اقتصاد دیجیتال” اینجا کلیک نمایید.
هنگامی که ربات روی یک دیوار پوشیده از نمد پرتاب شد، توانست در ۵۵ درصد از مواقع، بدون سقوط کردن به دیوار بچسبد. اگرچه ممکن است این کار، فوقالعاده به نظر نرسد اما میزان موفقیت ربات با حذف دم، تا ۱۵ درصد کاهش یافت. این موضوع با آنچه در گکوهای وحشی دیده شد، مطابقت دارد. کگوهای دمدار، ۸۷ درصد موفقیت داشتند اما کگوهایی که دم خود را هنگام مبارزه با شکارچیان یا در حوادث دیگر از دست داده بودند، تقریبا ناموفق بودند.
یوسفی گفت: ما با استفاده از این ربات توانستیم به بررسی چیزی بپردازیم که نمیتوانیم با استفاده از کگوها آنها را بررسی کنیم. نیروهای واکنشی دیوار هنگام فرود آمدن، تایید کردند که دم، بخش مهمی در فرود آمدن به شمار میرود. فرودگر رباتیک ما نه تنها در این زمینه تاثیر میگذارد، بلکه با افزایش استحکام و سادهسازی کنترل، به بهبود حرکات ربات کمک میکند.
این پژوهش، در مجله “Communications Biology” به چاپ رسید.
منبع: ایسنا و به نقل از نیواطلس،